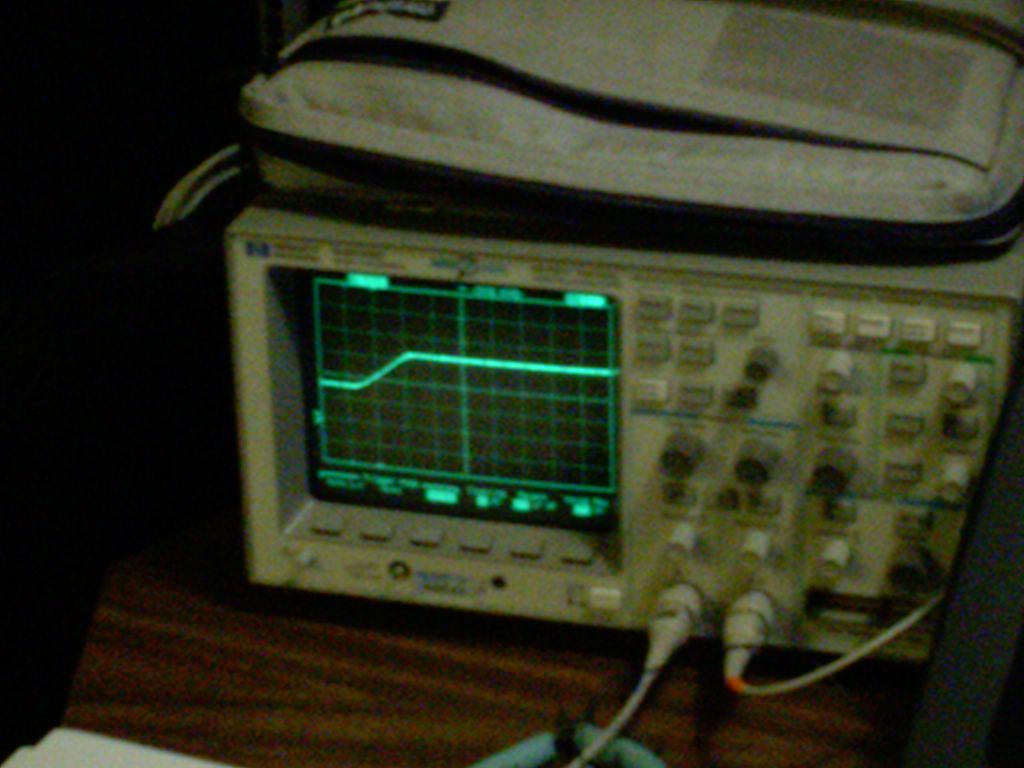
without ramping
This screen shot shows a normal servo command that is a straight line from starting to ending point. This translates into a servo motion that goes from full stop to full speed at the beginning of the motion, and vise versa at the end of the motion. The "speed" that the servo moves is choosable with the Parallax board (rate), but the transition from stop to moving is still one step. The abrupt changes in speed cause rocking and jerky motion for a bot like Knewt. It's an issue we considered trying to solve with MCU management of the "rate" variable every 20ms. But why do that when it's built into the ServoMojo?


Comments