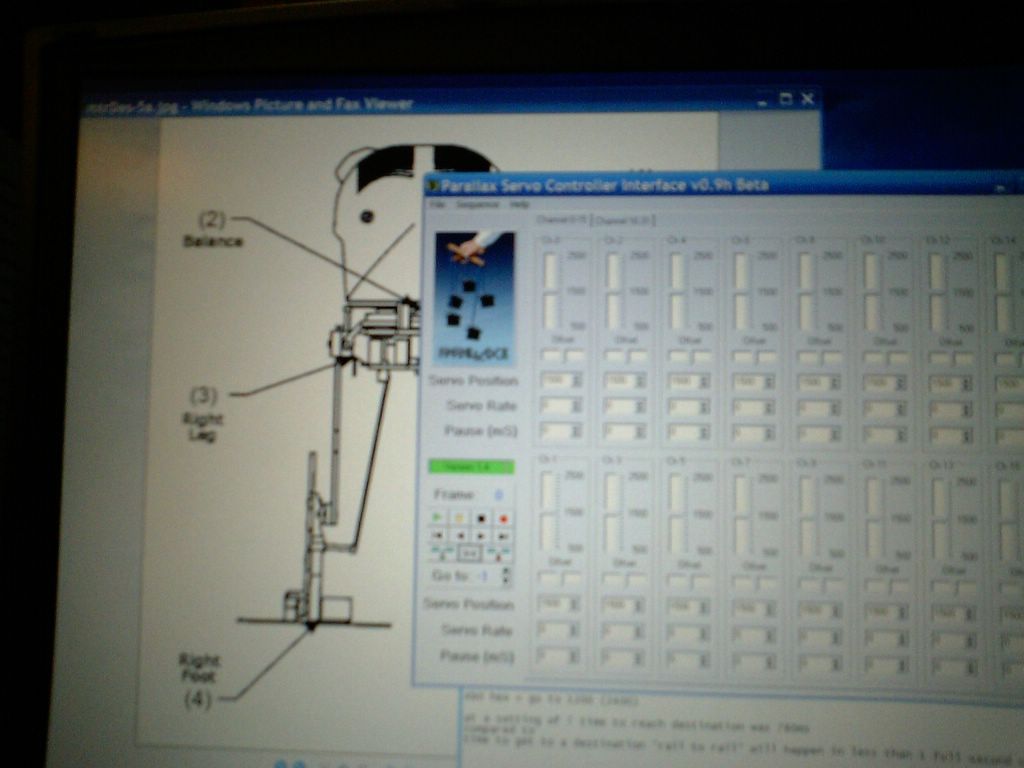
PSCI screen shot
Keith Rowell Design
The very basic idea is to move the bot into position with the sliders, save, and repeat.
You don't get what you might expect each time however, and the documentation doesn't answer very many questions.
After some investigation we learned, for instance, that the "goto" command works "befrore the current frame" so it's best to use it in a subsequent frame with nothing in it. Nice to know if you spent a while posing the thing.
There's a feature that will copy the contents of the current frame to the next frame. This happens automatically, "under certain conditions". I've not yet deciphered what those conditions are! So frequently I go on to the next frame and all the motors reset to 1500 (neutral). When this feature works, you can change the value of one motor, and you get a simple change from one state to another. When it doesn't work, you have to reset all the motors manually from the values in the previous frame. Writing them down in a notebook is handy when doing this. You see my point.
Choosing a delay value is the next issue. The delay is recognized in any frame, if any motor that changed values in that frame has a delay value. The delay will allow motions in that frame to complete without truncating the motion before the next frame starts. There is no way to determine before hand if your motion will finnish however except to try it. Parallax couldn't answer the question, "how do you calculate the delay value based on the speed setting, and distance travelled? So it's still a long trial and error process to make motions. But it does move faster than our previous hand coding of text files, somewhat.
In the future we'll work on a more dynamic motion solver that takes input from gyros and accelerometers.


Comments