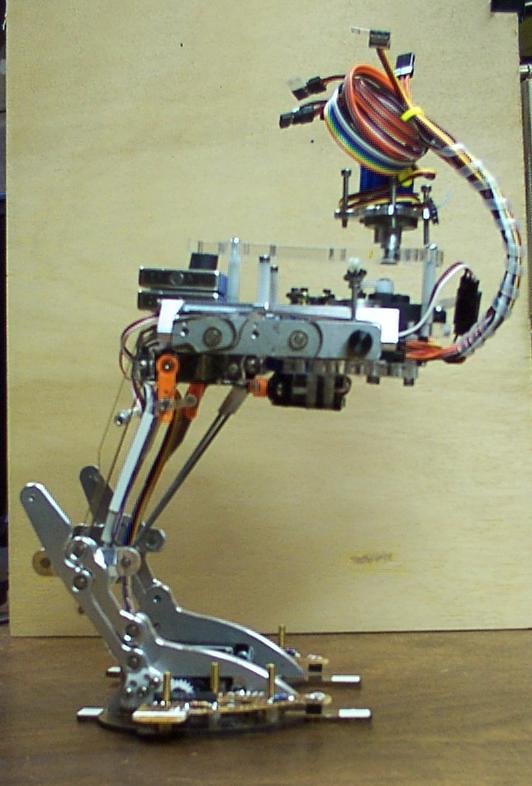
A Biped Robot Project
Phase two of the -Knewt- project attempts to control the servos and machined parts created in Phase one, using sensor feedback to acomplish dynamic walking in a biped robot.
Contributing Team members are:
Bob Baxter
J.P.Marting
Stuart Rolf
Dale Heatherington
Sponsors:
Brian Dean: BDMicro
Kevin Devol: IronCAD
Barry Smith: Draftech


Comments