A Biped Robot Project
Phase two of the -Knewt- project attempts to control the servos and machined parts created in Phase one, using sensor feedback to acomplish dynamic walking in a biped robot.
Contributing Team members are:
Bob Baxter
J.P.Marting
Stuart Rolf
Dale Heatherington
Sponsors:
Brian Dean: BDMicro
Kevin Devol: IronCAD
Barry Smith: Draftech
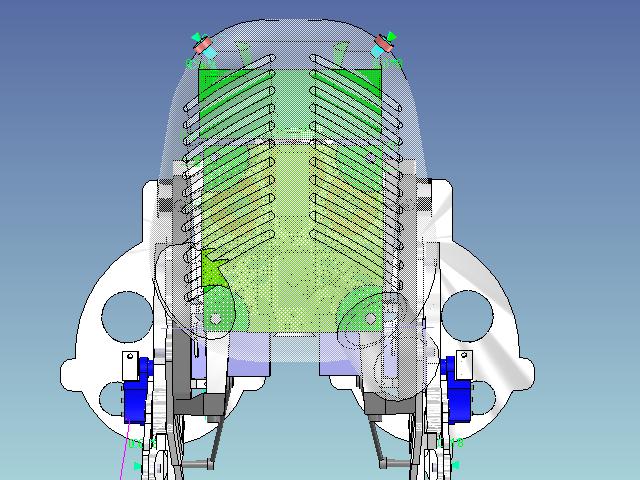
The width of the boards don't use up all of the space in the middle, but "cut it close" on the corners. Custom boards might be in order. We're looking into it.


Comments