Knewt Bulks Up
Knewt Bulks Up
Keith Rowell Design
After a long absence from the project, I am once again back in the saddle, and all the happier for it. We are adjusting the design to overcome some bugs revealed during testing and experimenting with a new driver ( more on the driver later).
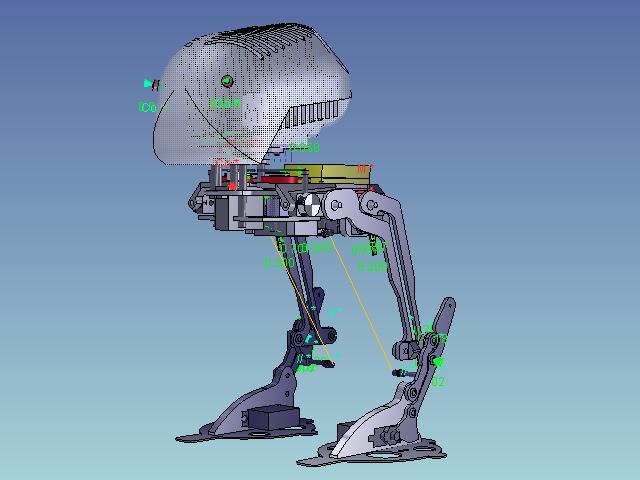
Mostly this means larger motors. The balance motor (1 below) has had to replaced repeatedly, and the leg motors (2,3) show high stress under load but have not yet failed outright. These 3 were HS55's with a torque of 15in/oz's. They've all been replaced with 81's which have 49in/oz's of torque.
It appears that with the bulkier body, the head might could stand some scaling up. The image above shows Knewt 2.0 with modifications to the backplate and chest plate to accommodate these larger servo motors. There's also a new motor added for "active" balance at the ankles. I had hoped that "passive" linkage would do this sufficiently, but alas, the "play" in so many joints causes Knewt to "lean" toward the foot that's off the ground, ruining the "level body" appearance I wanted, not to mention making it that much harder to balance during walking. The "active" balance motor (4) will replace the passive balance linkage, and work in unison with the weight shifting motor (1).


Comments