Bob's Code Puts Mojo Through it's Paces.
Bob Baxter writes code for a pic to send Hex code to the Servo Mojo, and we start testing.
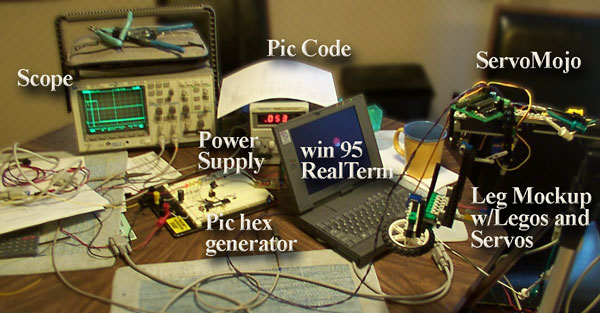
Testing the Leg Mockup
Keith Rowell Design
I don't see anything in the datasheet on the max rotation of the servo. I tried a couple of standard Hitec servos. They rotate just over 180 degrees at pulse widths of about 700usec to 2.3msec. Getting anywhere with the time line?
Bob
At 04:11 PM 7/11/04 -0400, you wrote:
>this link shows the servo I'm using.
> HiTek
> HS-55
> http://www.servocity.com/html/hs-55_sub-micro.html
> http://www.servocity.com/html/how_do_servos_work_.html
>
>we probably do need to use expanded mode to get more than 90deg.
>Keith
>
> > -----Original Message-----
> > Sent: Sunday, July 11, 2004 3:46 PM
> > Subject: modified Mojo Board software
> >
> > I have modified the code we were working with on Friday to handle wide mode. It seems to be working. I found that if I add a millisecond or two of inter-character delay the comm from the PC to the PIC is much more reliable.
> >
> > In looking at the manual it seems that just going to wide mode doesn't get you motion of greater than 90 degrees. I think you need to use the expanded pulse width mode to accomplish it. If you can send me the datasheet for the servos or let me know the manufacturer and part #, I'll take a look.
> >
> > Bob


Comments